 VIRMED Simulation Technologies
VIRMED Simulation Technologies



Products
Contact Info
Downloads




Skills Trainer
The current available skills trainers constitutes of using surgical tools such as laparoscopic devices to gain dexterity and familiarity of use for surgical procedures. A setup known as a Box Trainers is currently used to conduct these training activities. The box trainer is a mechanical device usually with two laparoscopes and a camera inserted through three holes in a box. The cameras view is projected onto a monitor which displays the internal environment of the box which is pointed to a board with various rows of pegs. The goal of the trainee is to use the laparoscopes to move small blocks with holes onto various pegs on the board.
Some of the short comings of this device is that there is no quantifiable measurement of performance that is derived from the procedure. Also the setup requires to be manually reset after a training session. One major advantage of this setup is the cost associated to the equipment which is relatively cheap.
I am experimenting with developing a simple product based on the simulation framework I have created that will provide the same level of dexterity and learning as the box trainer. However will inaddition provide metrics and performance results. The setup can be configured and reset with a single click of a button, with a variety of various training modules for various skills levels and competency. The randomization of parameters can provide a unique experience for every session.
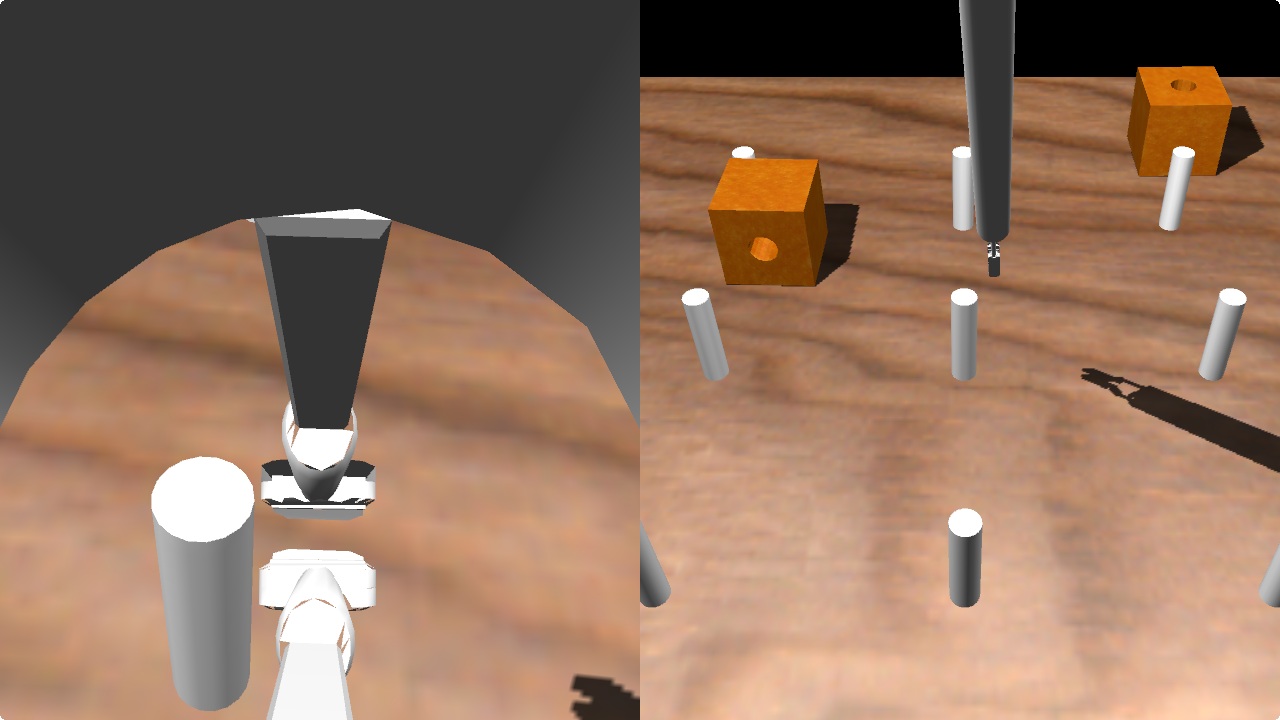
The figure above shows a simulated view of the the current prototype in development. The goal is to pickup the cubes with the laparscope grabber and place them on the pegs.
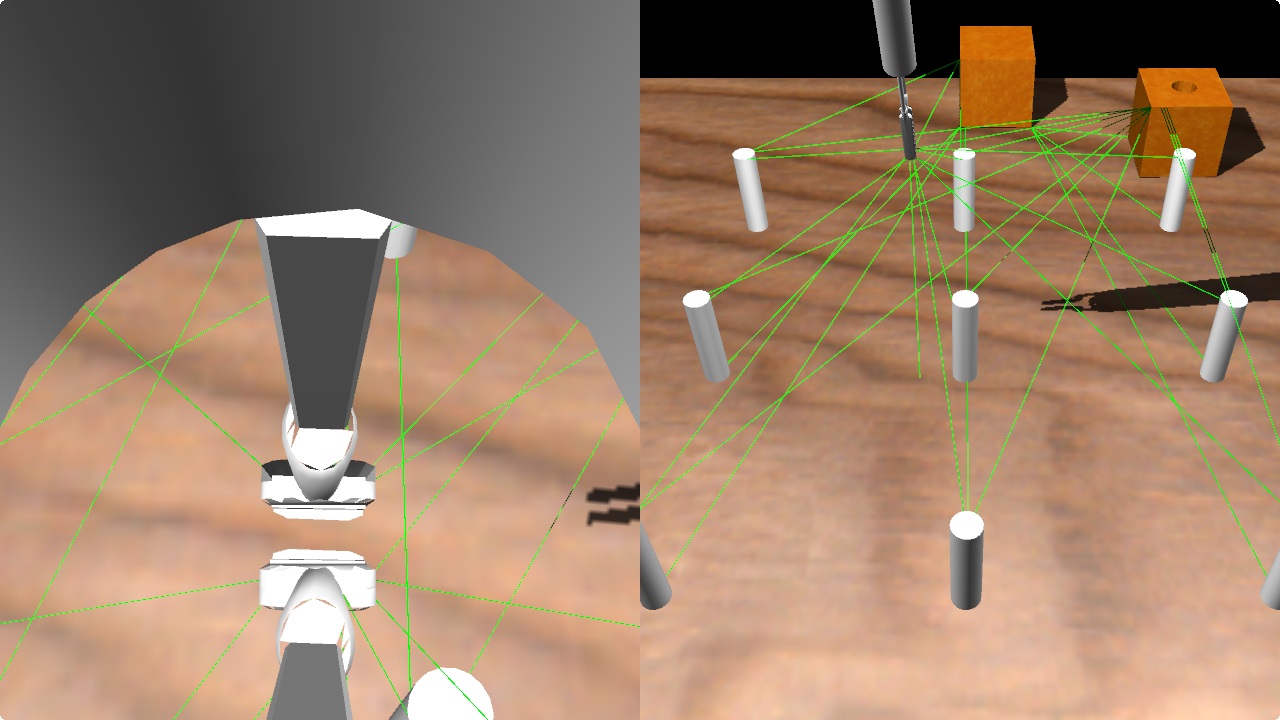
The figure above shows the simulation tracking objects in the scene. The visual lines can be enabled by the user via the Human Machine Interface (HMI) to help in depth perception, the lines are the computed shortest distance between objects. The tracking data of all or selected objects are written to the disk at a user specified frequency for analysis.